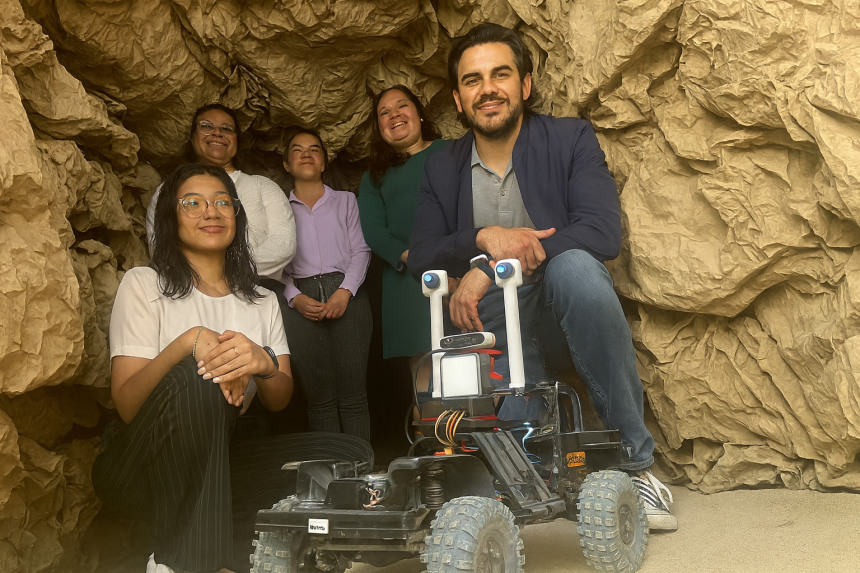
Un equipo de estudiantes del Instituto Politécnico Nacional (IPN) desarrolló un vehículo robótico autónomo diseñado para detectar riesgos geológicos, acumulaciones de gases tóxicos y condiciones extremas al interior de minas subterráneas. El dispositivo incorpora visión artificial y redes neuronales, y está enfocado en reducir la exposición de trabajadores a entornos de alto riesgo.
La iniciativa fue liderada por Carolina Abigail Gallo Meneses, Yesenia Cruz Domínguez y Lesly Verónica Salazar Jiménez, alumnas de la carrera de Ingeniería en Telemática de la Unidad Profesional Interdisciplinaria en Ingeniería y Tecnologías Avanzadas (UPIITA). El desarrollo del prototipo contó con la asesoría del doctor Rodolfo Vera Amaro (UPIITA) y de la doctora Lucero Verónica Lozano Vázquez (ESIME Azcapotzalco).
El sistema está basado en una microcomputadora Raspberry Pi 5 de alto rendimiento, a la cual se integraron sensores de monóxido de carbono y dióxido de nitrógeno, una cámara de profundidad, una lámpara y una plataforma móvil adaptada. Gracias a la cámara, el rover puede capturar imágenes RGB en completa oscuridad, permitiendo la construcción de mapas tridimensionales mediante el sistema Visual Simultaneous Localization and Mapping (V-SLAM).
El procesamiento de datos se realiza de forma offline, lo cual resulta esencial en entornos donde no hay señal GPS ni conexión a internet, como es común en minas profundas. Las imágenes obtenidas por el sistema se almacenan y visualizan posteriormente a través de una plataforma web que incluye mapas 3D, localización geoespacial, hora de recorrido y gráficas sobre los niveles de gases detectados.
Durante las pruebas de campo, el equipo técnico visitó una mina en Durango para validar el desempeño del sistema en condiciones reales. En este entorno, el rover operó de manera autónoma a más de 30 kilómetros de profundidad, donde la señal de GPS es completamente inexistente. Según el equipo desarrollador, esta autonomía representa una ventaja significativa frente a otros sistemas de inspección minera que requieren la manipulación directa por parte de personal en campo.
El entrenamiento del modelo de inteligencia artificial se llevó a cabo con una base inicial de 5,500 imágenes. Posteriormente, las imágenes fueron manipuladas en distintas posiciones y condiciones para ampliar la base a 13,000. El material gráfico se obtuvo tanto en escenarios reales como en una maqueta diseñada para simular condiciones subterráneas.
Una vez procesados los datos, el sistema permite generar modelos detallados del entorno, donde se identifican con precisión elementos como fracturas estructurales, zonas con desprendimientos, piedras sueltas e incluso áreas inundadas. Esta información contribuye a una toma de decisiones más informada en materia de seguridad operativa en minería.
Este proyecto forma parte del compromiso número 33 del plan de 100 acciones prioritarias impulsado por la presidenta Claudia Sheinbaum Pardo y coordinado por la Secretaría de Educación Pública (SEP), dirigida por Mario Delgado Carrillo. El objetivo de este eje es fomentar que los desarrollos científicos y tecnológicos de los estudiantes mexicanos tengan aplicación práctica en sectores estratégicos, como el minero.
Las estudiantes del IPN no descartan iniciar un proceso de patente del sistema, ni extender su uso a escala industrial. El prototipo representa una solución nacional de bajo costo frente a las opciones tecnológicas extranjeras disponibles actualmente, muchas de las cuales requieren infraestructura especializada y personal entrenado, lo que incrementa el costo y los riesgos de operación.
El sistema también demuestra la viabilidad de utilizar tecnología desarrollada en instituciones públicas mexicanas para resolver problemas complejos y recurrentes en la industria extractiva. En un sector históricamente asociado con altos niveles de riesgo, contar con herramientas autónomas que reduzcan la exposición humana directa representa un avance significativo en materia de seguridad laboral.
En términos técnicos y operativos, el proyecto cumple con los requisitos para ser implementado en programas de inspección rutinaria, monitoreo ambiental y prevención de accidentes en minas activas. También se perfila como una solución escalable, adaptable a distintos tipos de yacimientos y condiciones geológicas.
En conclusión, el desarrollo del rover del IPN evidencia la capacidad de las instituciones mexicanas para generar soluciones tecnológicas útiles, con impacto directo en la mejora de procesos industriales. Asimismo, refuerza el papel del sector académico en el fortalecimiento de prácticas de seguridad en la minería subterránea, una actividad que continúa siendo vital para la economía nacional.